4.5 pde.solvers package
Solver classes define the strategy for evolving PDE states in time.
A solver object stores the numerical method and configuration and is used to construct an executable stepping function that advances the current state.
Explicit Adams-Bashforth multi-step solver. |
|
Base class for solvers that can produce adaptive stepping functions. |
|
Base class for persistent PDE solver strategy objects. |
|
Class controlling a simulation. |
|
Crank-Nicolson solver. |
|
Explicit Euler solver. |
|
Explicit Euler solver using MPI. |
|
Implicit (backward) Euler PDE solver. |
|
Milstein method for stochastic differential equations. |
|
Explicit Runge-Kutta PDE solver of order 5(4). |
|
PDE solver using |
|
Returns all solvers that are currently registered. |
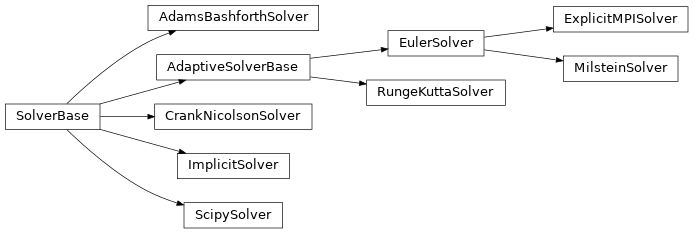
Inheritance structure of the classes:
- 4.5.1 pde.solvers.adams_bashforth module
- 4.5.2 pde.solvers.base module
- 4.5.3 pde.solvers.controller module
- 4.5.4 pde.solvers.crank_nicolson module
- 4.5.5 pde.solvers.euler module
- 4.5.6 pde.solvers.explicit_mpi module
- 4.5.7 pde.solvers.implicit module
- 4.5.8 pde.solvers.milstein module
- 4.5.9 pde.solvers.runge_kutta module
- 4.5.10 pde.solvers.scipy module